
目录
快速导航-
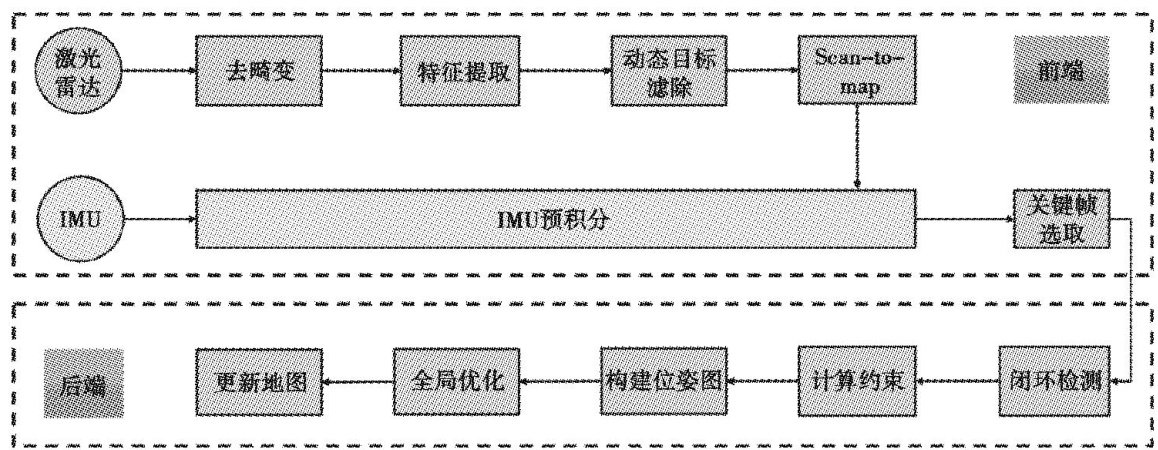
智能农技 | 基于多传感融合目标检测的动态物剔除SLAM算法
智能农技 | 基于多传感融合目标检测的动态物剔除SLAM算法
-
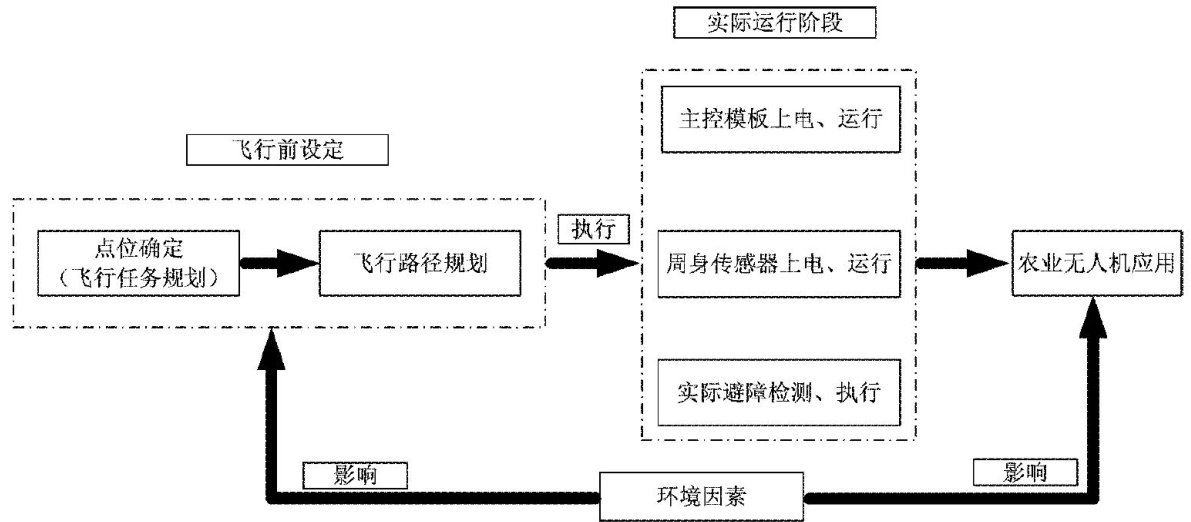
智能农技 | 农业无人机路径规划及避障控制系统设计及试验
智能农技 | 农业无人机路径规划及避障控制系统设计及试验
-

智能农技 | 单片机与蓝牙协同控制的模块化豆类智能播种机研制
智能农技 | 单片机与蓝牙协同控制的模块化豆类智能播种机研制
-

智能农技 | 面向变量施肥的无人机遥感与喷施协同控制策略分析与试验
智能农技 | 面向变量施肥的无人机遥感与喷施协同控制策略分析与试验
-
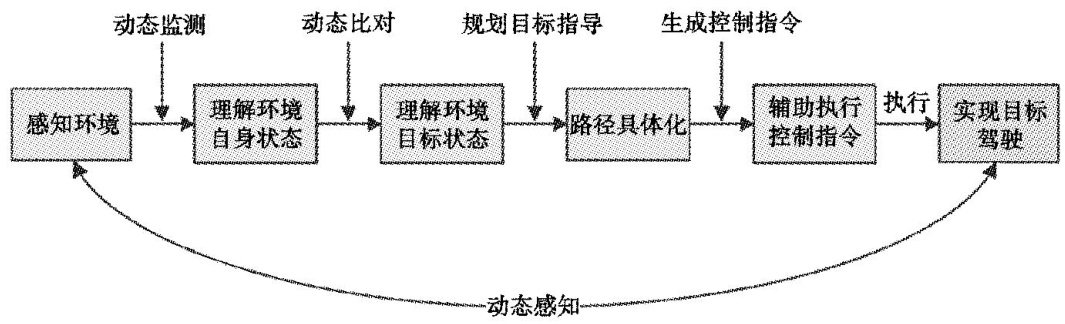
智能农技 | 基于多传感器融合的农业拖拉机自动驾驶控制技术设计与试验
智能农技 | 基于多传感器融合的农业拖拉机自动驾驶控制技术设计与试验
-
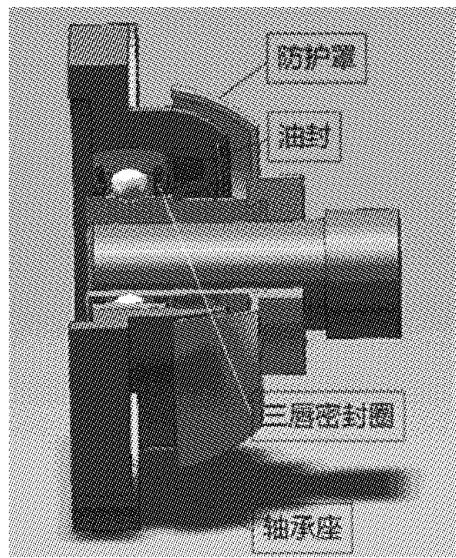
设计与试验 | 防残膜缠绕集成式农机轴承设计改进
设计与试验 | 防残膜缠绕集成式农机轴承设计改进
-

设计与试验 | 基于低损伤技术的山药高效采收机设计与性能优化
设计与试验 | 基于低损伤技术的山药高效采收机设计与性能优化
-
设计与试验 | 圆捆包夹持机构的设计与试验
设计与试验 | 圆捆包夹持机构的设计与试验
-

设计与试验 | 花键用10CrNi2Mo3Cu2V钢磨削力和温度试验
设计与试验 | 花键用10CrNi2Mo3Cu2V钢磨削力和温度试验
-
设计与试验 | 数控机床工艺参数优化策略及试验
设计与试验 | 数控机床工艺参数优化策略及试验
-
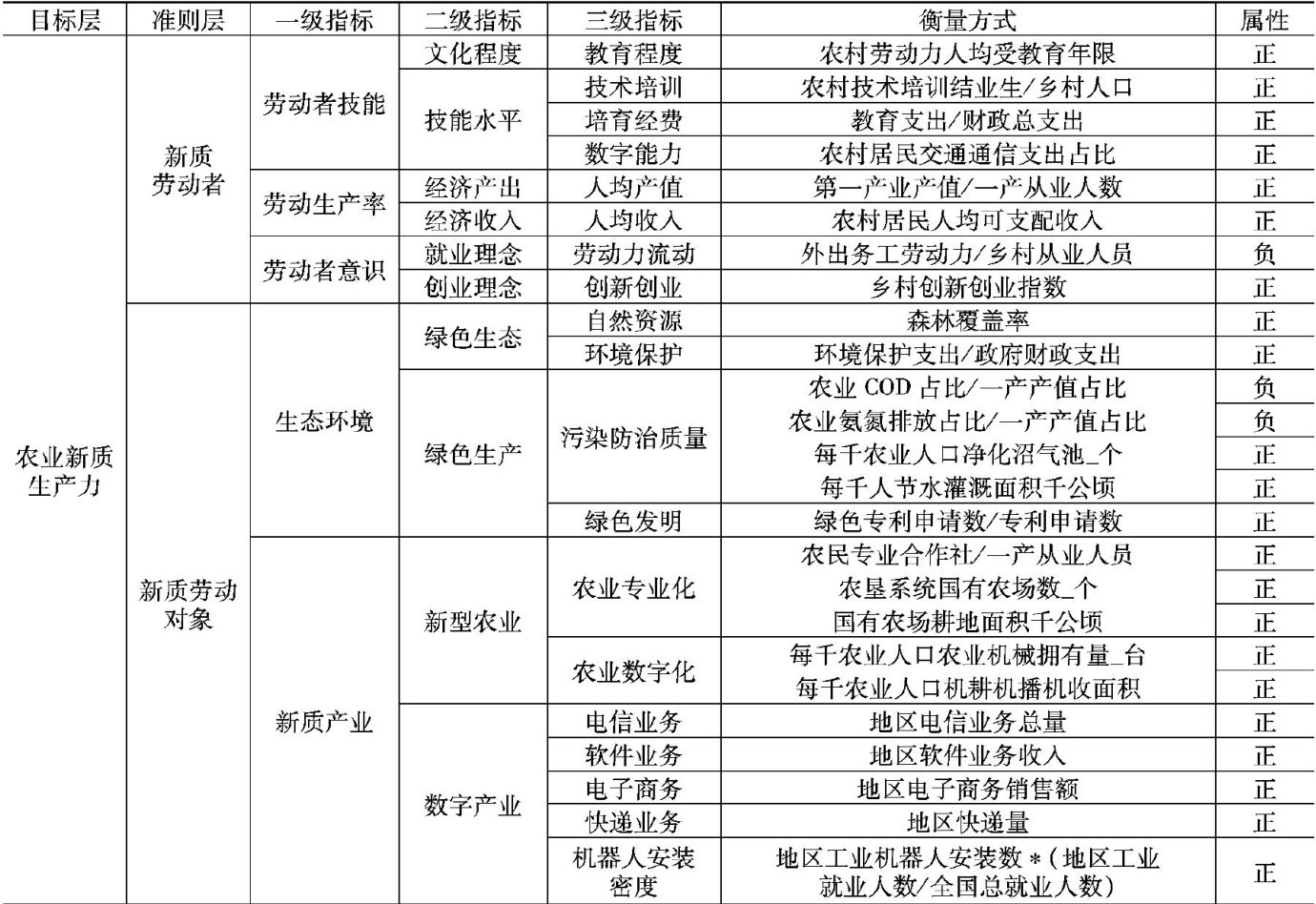
综合述评 | 农业新质生产力与共同富裕
综合述评 | 农业新质生产力与共同富裕
-

综合述评 | 大数据驱动下农产品营销变革与消费者行为深度剖析
综合述评 | 大数据驱动下农产品营销变革与消费者行为深度剖析
-

综合述评 | 基于财务视角的乡村振兴资金管理机制优化研究
综合述评 | 基于财务视角的乡村振兴资金管理机制优化研究
-
综合述评 | 乡村振兴背景下农村生态环境治理研究
综合述评 | 乡村振兴背景下农村生态环境治理研究
-
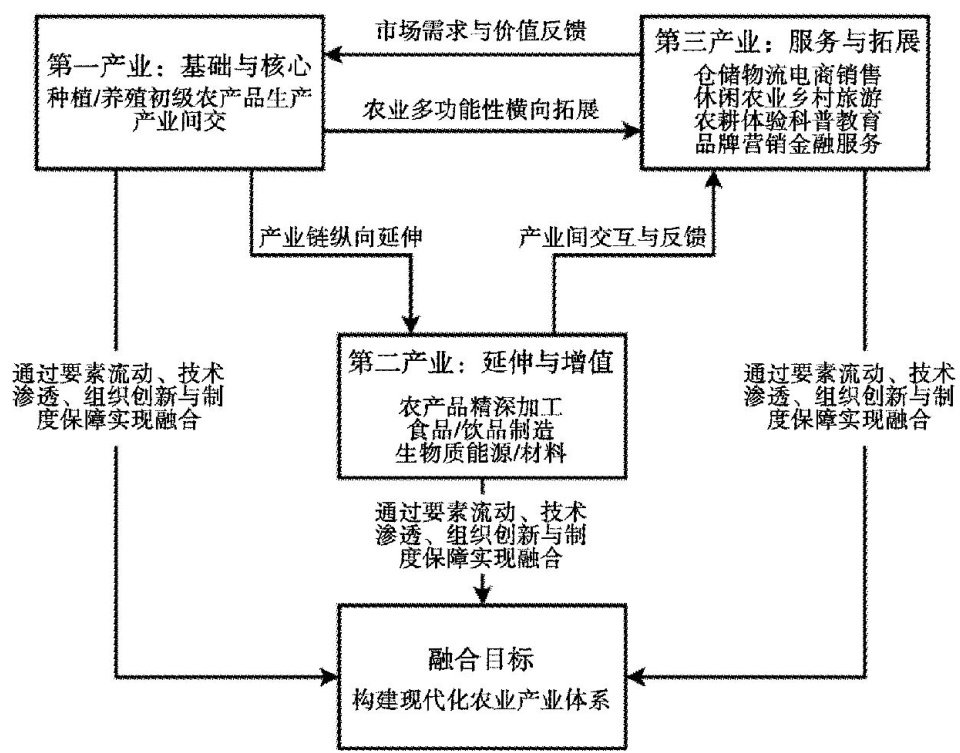
综合述评 | “三产融合”模式在现代农业经济中的应用
综合述评 | “三产融合”模式在现代农业经济中的应用
-

技术应用 | 现代农机装备及自动控制技术在设施蔬菜生产中的应用
技术应用 | 现代农机装备及自动控制技术在设施蔬菜生产中的应用
-
技术应用 | 基于智能控制系统的农业机械自动化技术研究
技术应用 | 基于智能控制系统的农业机械自动化技术研究
-
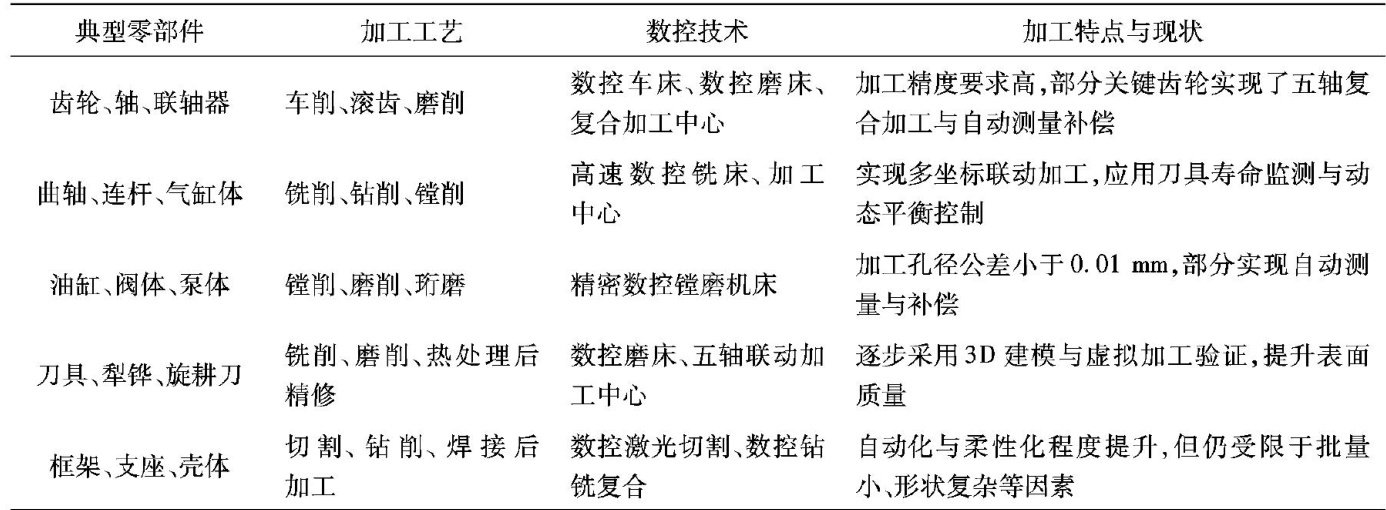
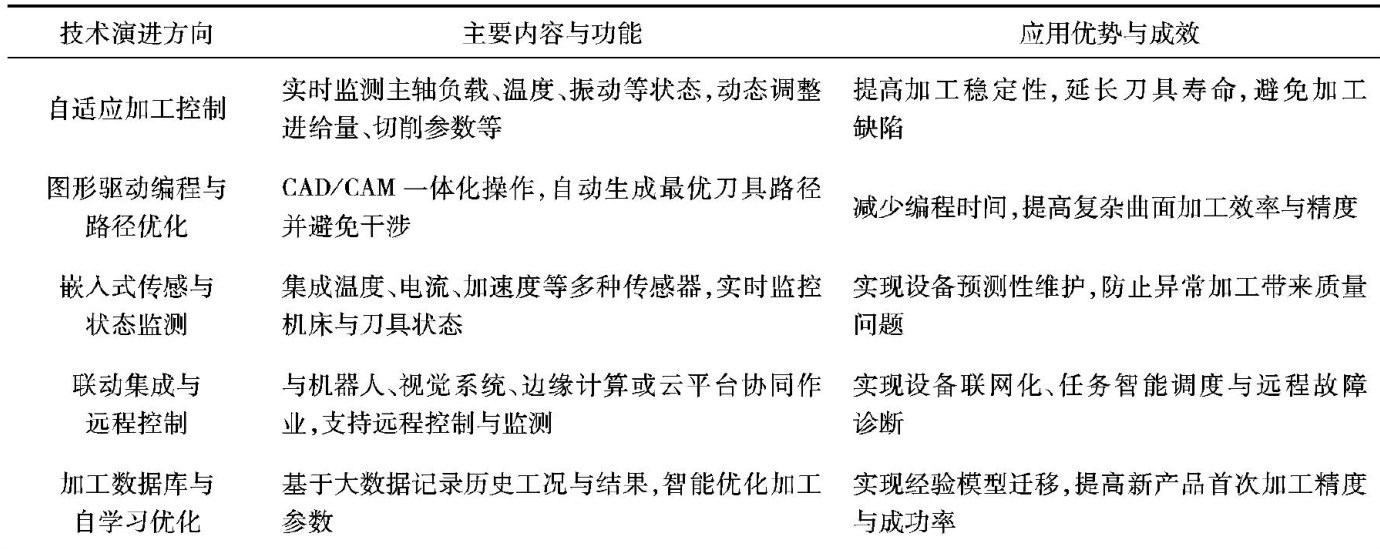
技术应用 | 农机关键零部件高性能数控加工技术创新与应用
技术应用 | 农机关键零部件高性能数控加工技术创新与应用
-
技术应用 | 机械加工制造中自动化技术的实践探索
技术应用 | 机械加工制造中自动化技术的实践探索
-
技术应用 | 伺服控制技术在数控加工中的应用价值与提升方向
技术应用 | 伺服控制技术在数控加工中的应用价值与提升方向
-
技术应用 | 精密加工技术在数控技术中的应用与发展
技术应用 | 精密加工技术在数控技术中的应用与发展
-
使用与故障排除 | 基于CAN总线的新能源汽车运行参数监测与故障报警系统
使用与故障排除 | 基于CAN总线的新能源汽车运行参数监测与故障报警系统
-
使用与故障排除 | 信息技术在汽车维修中的作用及运用分析
使用与故障排除 | 信息技术在汽车维修中的作用及运用分析
-
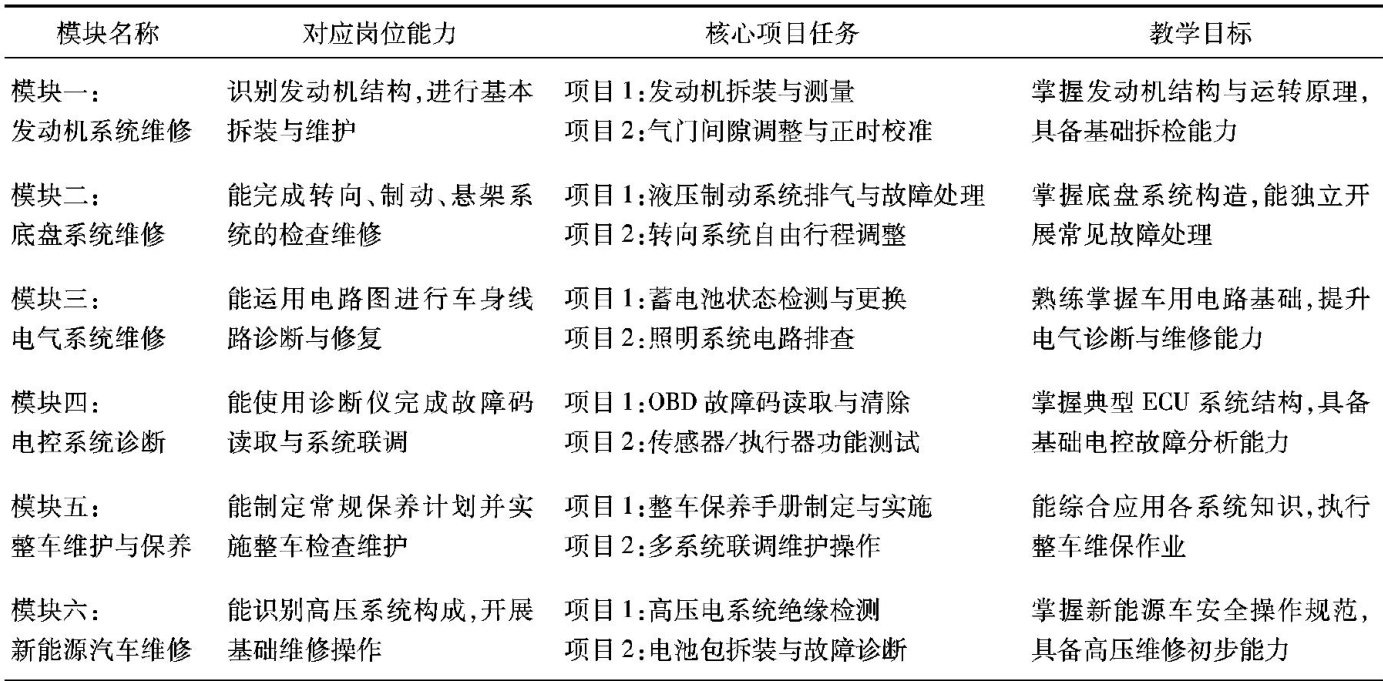
使用与故障排除 | 工学一体化背景下的汽车维修课程创新与应用
使用与故障排除 | 工学一体化背景下的汽车维修课程创新与应用
-

现代农业 | 直播机收再生种植对黄华占产量和经济效益的影响
现代农业 | 直播机收再生种植对黄华占产量和经济效益的影响
-

现代农业 | 温湿度调控下贵州烟叶吸湿力学性能的多尺度耦合机制与分型加工
现代农业 | 温湿度调控下贵州烟叶吸湿力学性能的多尺度耦合机制与分型加工
-
现代农业 | 深松作业对黑土区土壤结构与玉米产量的长期效应
现代农业 | 深松作业对黑土区土壤结构与玉米产量的长期效应
-

现代农业 | 伊型河谷垦区冬小麦倒伏原因分析及综合防治对策
现代农业 | 伊型河谷垦区冬小麦倒伏原因分析及综合防治对策
-
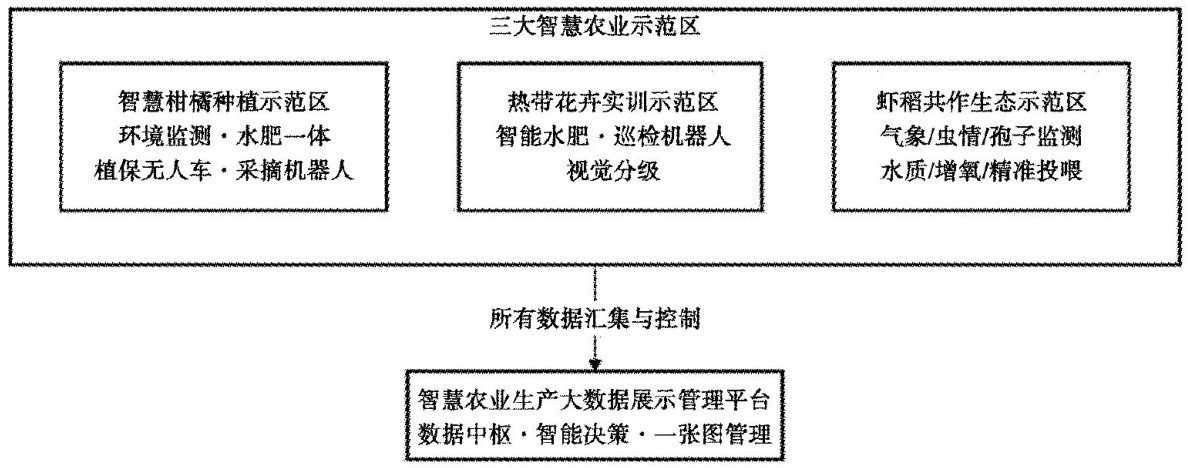
产学研用 | 新质生产力视角下智慧农业产教融合创新服务基地建设
产学研用 | 新质生产力视角下智慧农业产教融合创新服务基地建设
-
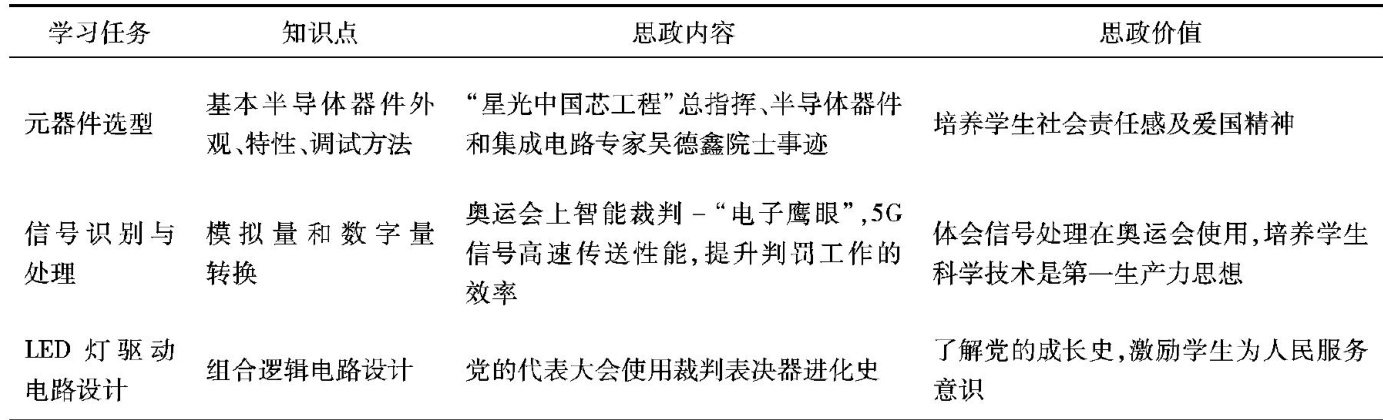
产学研用 | 人工智能背景下电子技术课程设计教学模式改革初探
产学研用 | 人工智能背景下电子技术课程设计教学模式改革初探
-
产学研用 | 高职院校电子信息类学生就业创业服务平台信息化建设
产学研用 | 高职院校电子信息类学生就业创业服务平台信息化建设
-
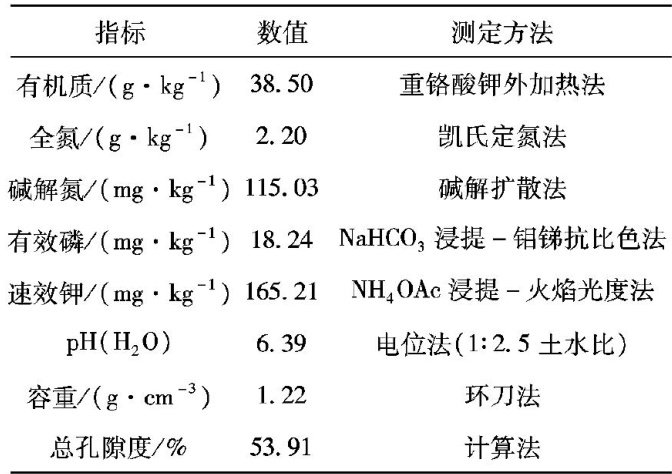
产学研用 | 基于项目化教学的水肥一体化课程改革探索
产学研用 | 基于项目化教学的水肥一体化课程改革探索
-
产学研用 | 新工科背景下非机械类专业工程制图课程教学改革研究
产学研用 | 新工科背景下非机械类专业工程制图课程教学改革研究
-
产学研用 | 基于FluidSIM的液压与气动技术教学改革与实践
产学研用 | 基于FluidSIM的液压与气动技术教学改革与实践
-
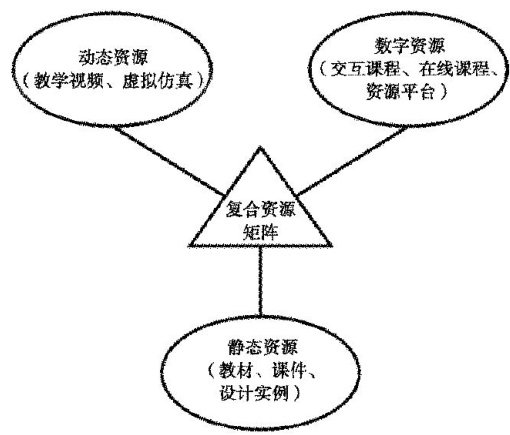
产学研用 | 产教融合背景下单片机课程资源建设
产学研用 | 产教融合背景下单片机课程资源建设
 ,显著低于人工作业成本 (4500π/hm2 )。在破损率方面,机械作业约为 10%~15% ,高于人工的 5%~10% ,但人工造成的损伤多不可修复,而机械损伤较易恢复。因此,在大规模种植中,机械作业的综合破损损失反而更低。此外,其关键部件寿命可达
,显著低于人工作业成本 (4500π/hm2 )。在破损率方面,机械作业约为 10%~15% ,高于人工的 5%~10% ,但人工造成的损伤多不可修复,而机械损伤较易恢复。因此,在大规模种植中,机械作业的综合破损损失反而更低。此外,其关键部件寿命可达  ,预计2年内回收成本。该机可适配规模化种植需求,对实现机械化收获,提升效率、降本减损具有重要的现实意义。
,预计2年内回收成本。该机可适配规模化种植需求,对实现机械化收获,提升效率、降本减损具有重要的现实意义。










 登录
登录