
目录
快速导航-

通信与信息工程 | 噪声背景下基于累加排列熵加权的雷达目标检测方法
通信与信息工程 | 噪声背景下基于累加排列熵加权的雷达目标检测方法
-
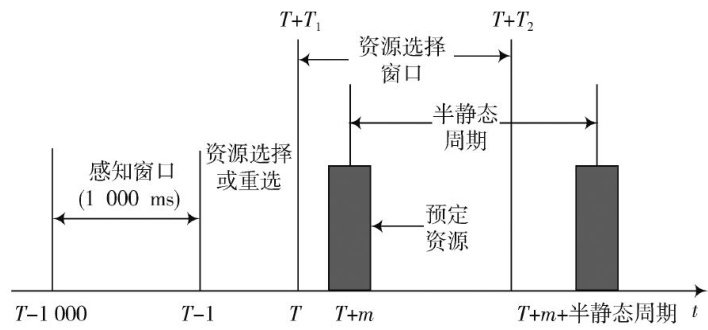
通信与信息工程 | 基于动态资源分配的C-V2X拥塞控制策略
通信与信息工程 | 基于动态资源分配的C-V2X拥塞控制策略
-

通信与信息工程 | 基于自适应空间通道收缩网络的自动调制识别算法
通信与信息工程 | 基于自适应空间通道收缩网络的自动调制识别算法
-
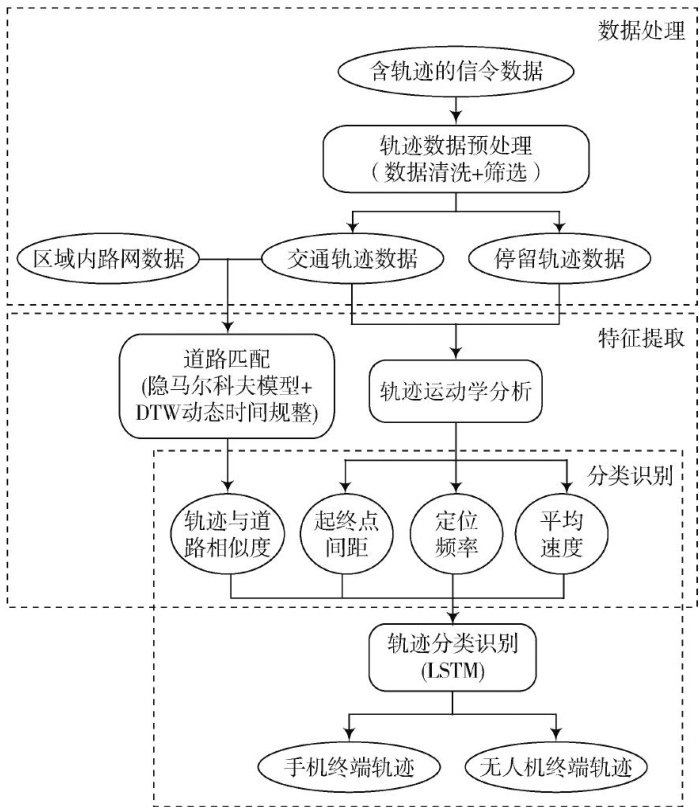
通信与信息工程 | 基于隐马尔科夫模型和LSTM的蜂窝网联无人机轨迹识别技术研究
通信与信息工程 | 基于隐马尔科夫模型和LSTM的蜂窝网联无人机轨迹识别技术研究
-

通信与信息工程 | 利用CNN-LSTM融合模型实现GNSS诱导式欺骗干扰检测
通信与信息工程 | 利用CNN-LSTM融合模型实现GNSS诱导式欺骗干扰检测
-
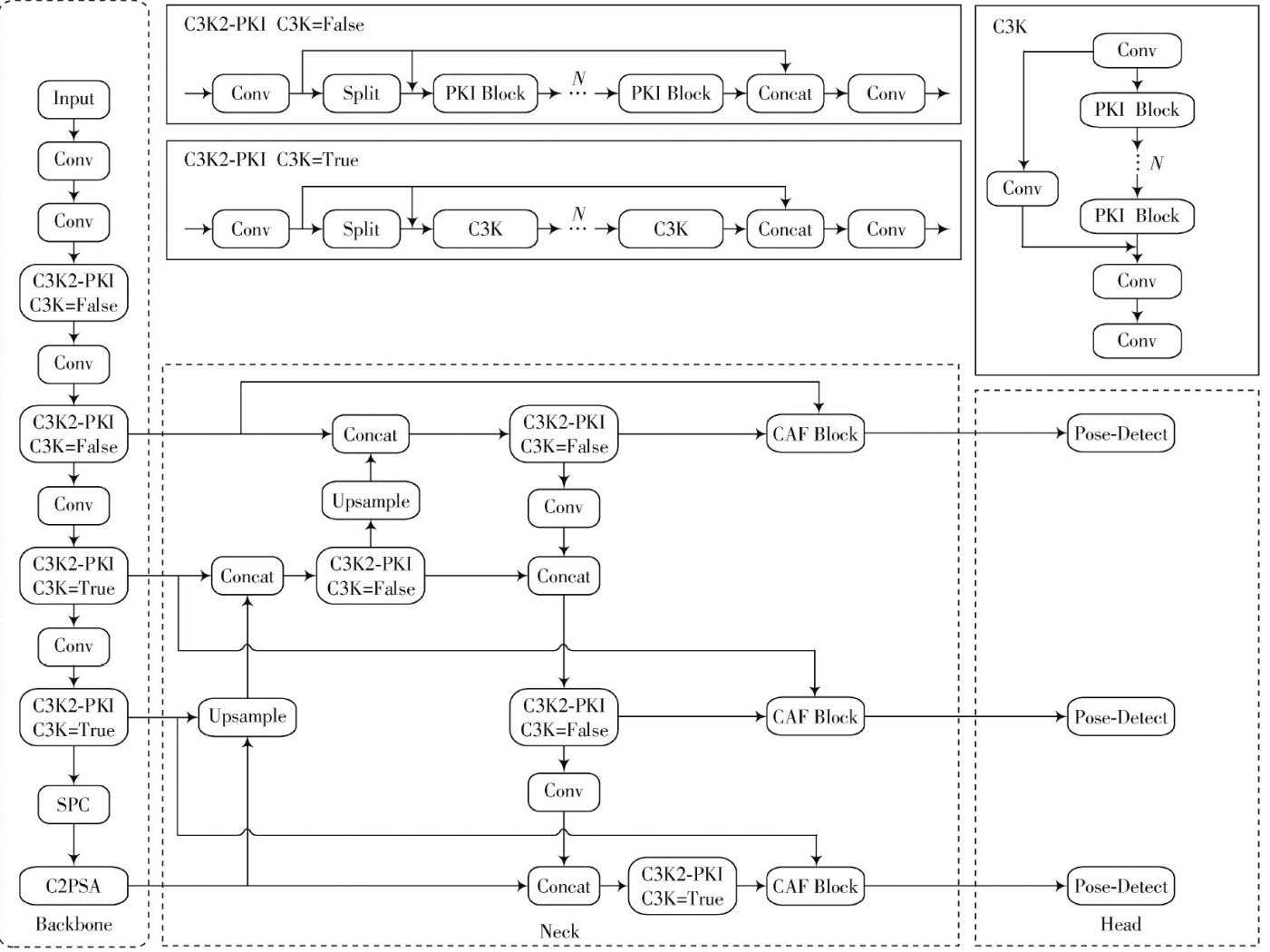
信号分析与图像处理 | 基于关键点特征提取与融合的人体姿态检测模型
信号分析与图像处理 | 基于关键点特征提取与融合的人体姿态检测模型
-
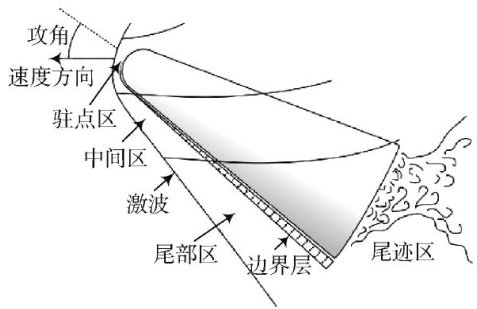
信号分析与图像处理 | 等离子鞘套包覆临近空间高速日标逆合成孔径雷达成像方法
信号分析与图像处理 | 等离子鞘套包覆临近空间高速日标逆合成孔径雷达成像方法
-

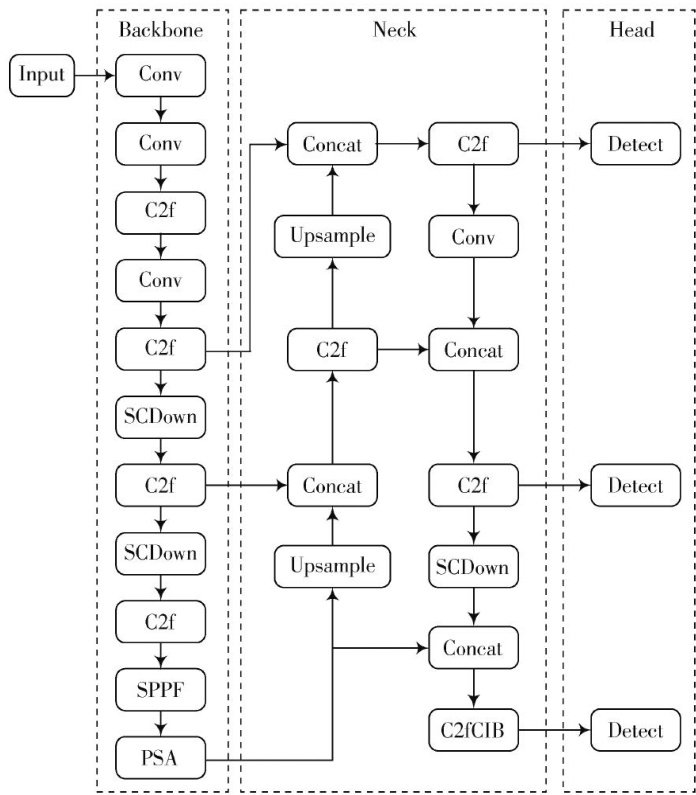
信号分析与图像处理 | 基于改进YOLOv10的全天候无人机航拍图像检测算法
信号分析与图像处理 | 基于改进YOLOv10的全天候无人机航拍图像检测算法
-
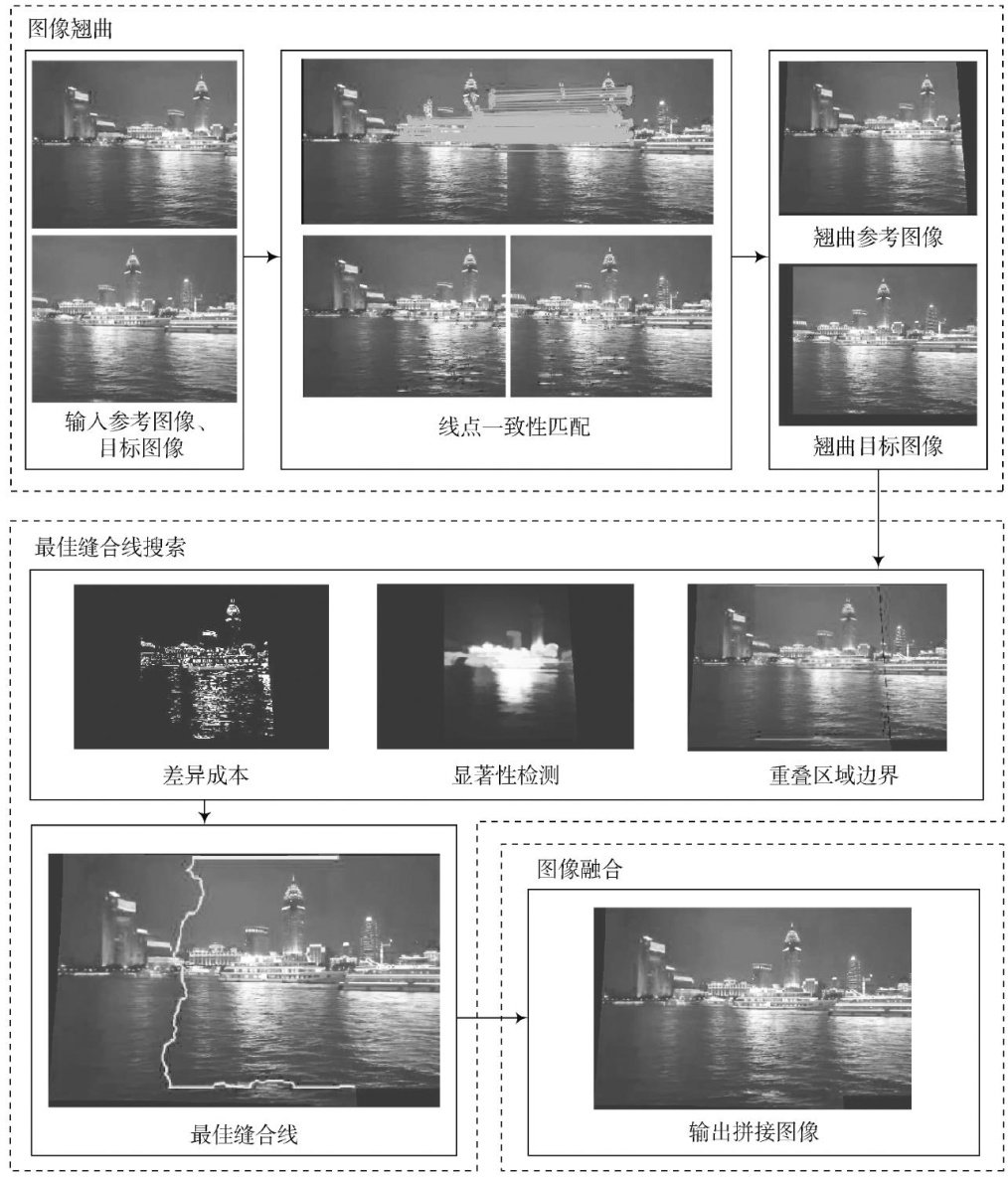
信号分析与图像处理 | 基于改进最佳缝合线的海上低照度图像拼接方法
信号分析与图像处理 | 基于改进最佳缝合线的海上低照度图像拼接方法
-

信号分析与图像处理 | 高斯边缘增强的自监督单目深度估计
信号分析与图像处理 | 高斯边缘增强的自监督单目深度估计
-

网络与信息安全 | 动态信誉驱动的联邦学习恶意攻击检测与隐私保护协同优化方法
网络与信息安全 | 动态信誉驱动的联邦学习恶意攻击检测与隐私保护协同优化方法
-
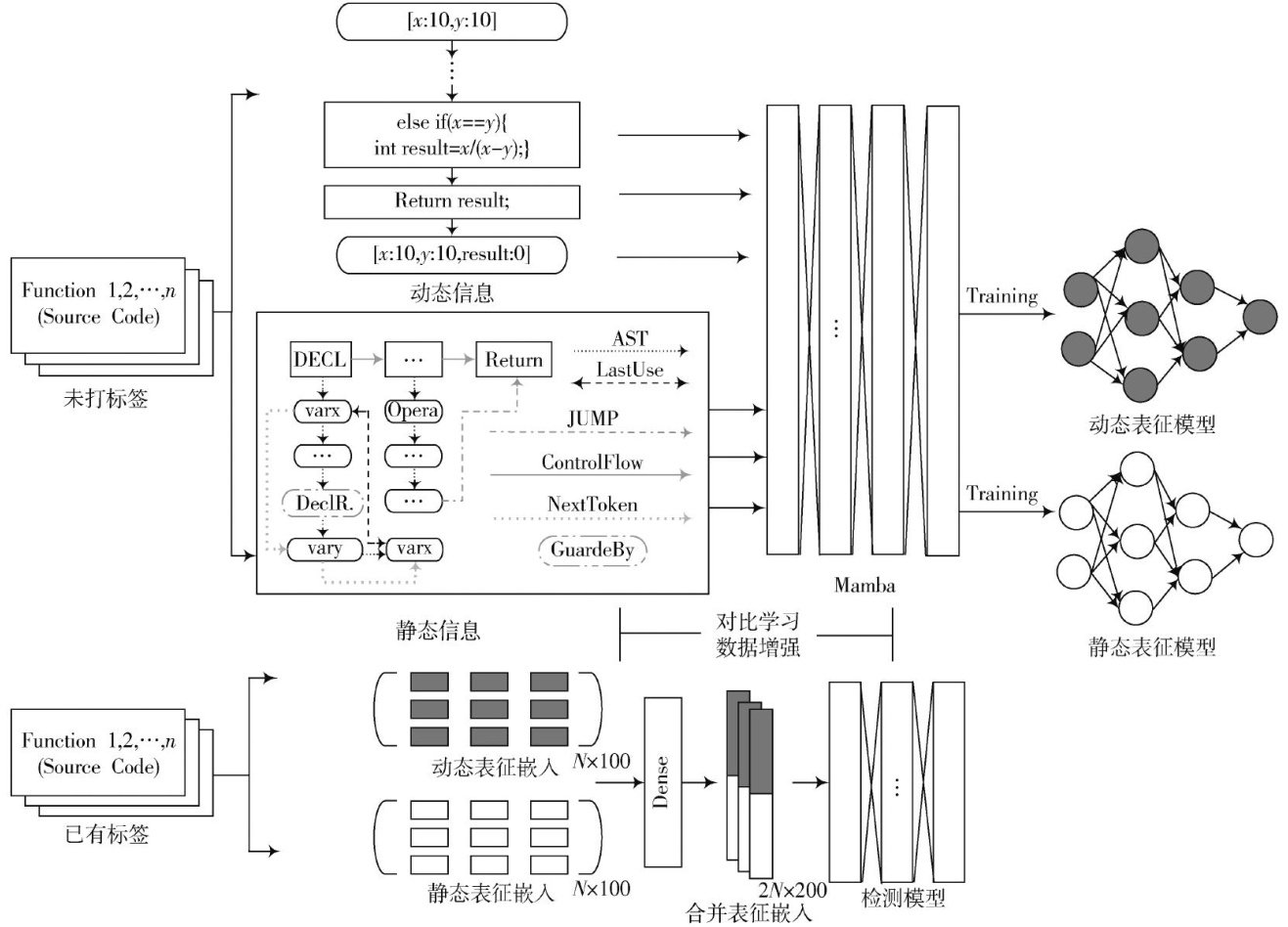
网络与信息安全 | 融合静态和动态信息特征的代码漏洞检测研究
网络与信息安全 | 融合静态和动态信息特征的代码漏洞检测研究
-
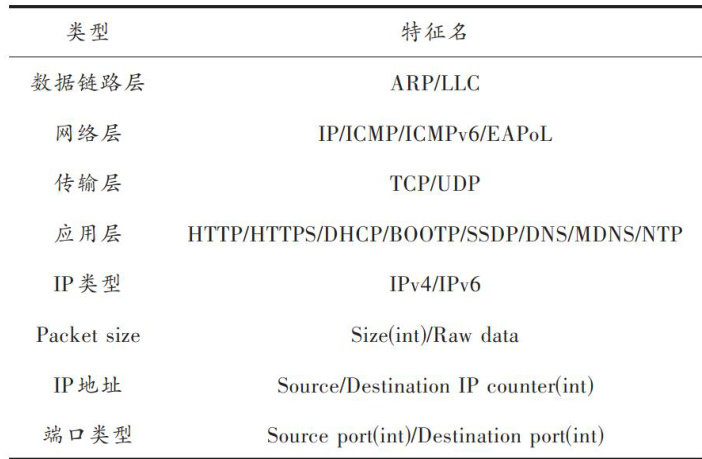
网络与信息安全 | 基于模型融合的物联网设备识别方法
网络与信息安全 | 基于模型融合的物联网设备识别方法
-
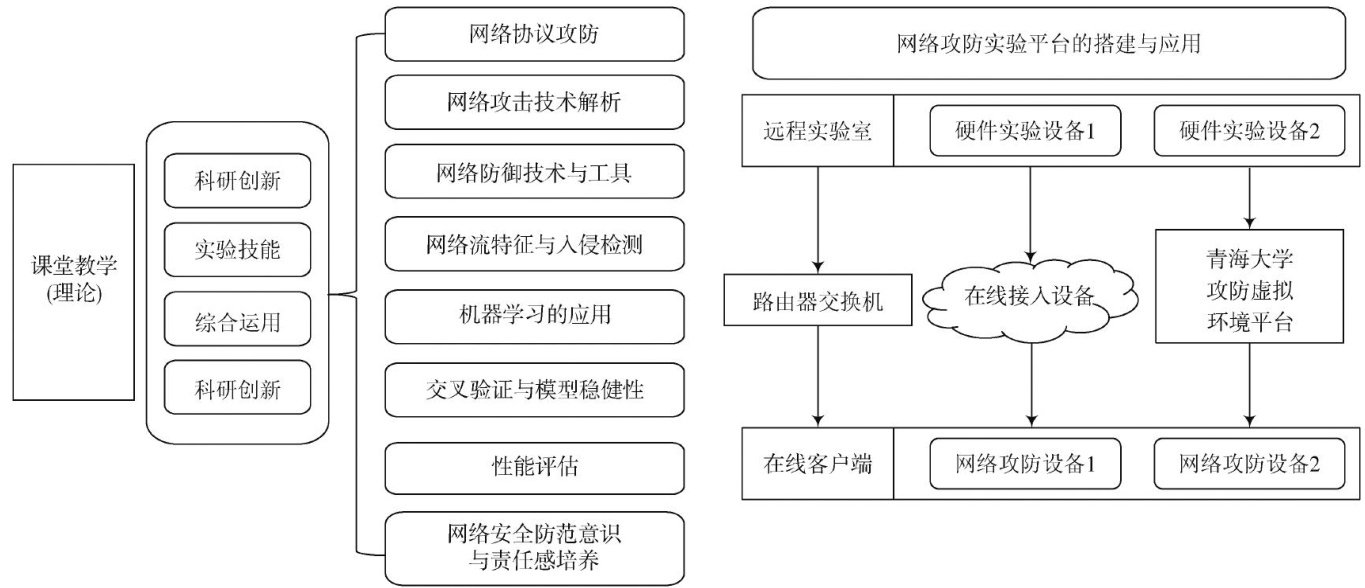
网络与信息安全 | 基于机器学习的网络攻防实验设计与实现
网络与信息安全 | 基于机器学习的网络攻防实验设计与实现
-
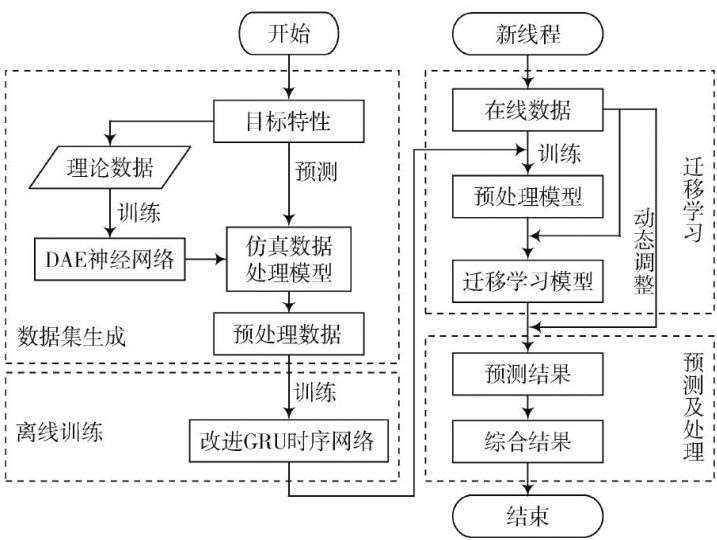
测控与自动化技术 | 基于DAEPARGRU的飞行自标实时航迹预测方法
测控与自动化技术 | 基于DAEPARGRU的飞行自标实时航迹预测方法
-

测控与自动化技术 | 基于自适应特征模态分解的RFID欠定源数估计方法
测控与自动化技术 | 基于自适应特征模态分解的RFID欠定源数估计方法
-
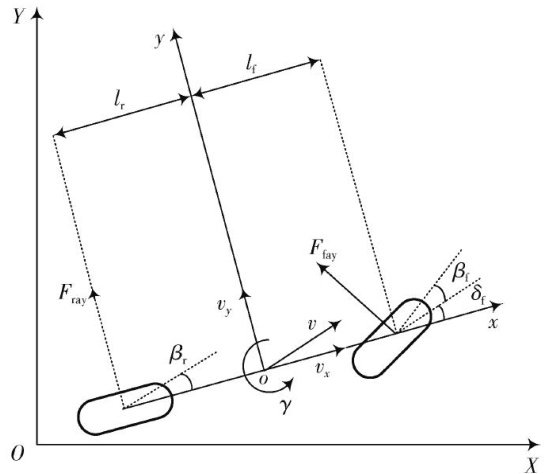
测控与自动化技术 | 融合道路曲率信息的智能驾驶车辆路径跟踪控制
测控与自动化技术 | 融合道路曲率信息的智能驾驶车辆路径跟踪控制
-
测控与自动化技术 | 基于毫米波雷达和相机融合的3D目标检测研究
测控与自动化技术 | 基于毫米波雷达和相机融合的3D目标检测研究
-
测控与自动化技术 | 基于弹丸底部形变重构的应变传感器最优布局
测控与自动化技术 | 基于弹丸底部形变重构的应变传感器最优布局
-
电子技术及应用 | 基于加权互补四元数的姿态检测与实现
电子技术及应用 | 基于加权互补四元数的姿态检测与实现
-

电子技术及应用 | 基于稀疏度优化的SA-OMP的谐波和间谐波检测方法
电子技术及应用 | 基于稀疏度优化的SA-OMP的谐波和间谐波检测方法
-

电子技术及应用 | 基于提示学习的模态缺失下多模态联合表征方法研究
电子技术及应用 | 基于提示学习的模态缺失下多模态联合表征方法研究
-
电子技术及应用 | 基于超声波技术的矿浆粒度智能化监测系统
电子技术及应用 | 基于超声波技术的矿浆粒度智能化监测系统
-

电子技术及应用 | 基于施密特正交化和互信息的扬声器与传声器位置联合优化
电子技术及应用 | 基于施密特正交化和互信息的扬声器与传声器位置联合优化
-

智能交通与导航 | 基于改进YOLOv8n-seg的非机动车道场景实例分割算法
智能交通与导航 | 基于改进YOLOv8n-seg的非机动车道场景实例分割算法
-
智能交通与导航 | 对于小目标行人和密集行人的目标检测
智能交通与导航 | 对于小目标行人和密集行人的目标检测
-
智能交通与导航 | 基于HRM-YOLO的交通标志检测算法
智能交通与导航 | 基于HRM-YOLO的交通标志检测算法





















 登录
登录