

目录
快速导航-
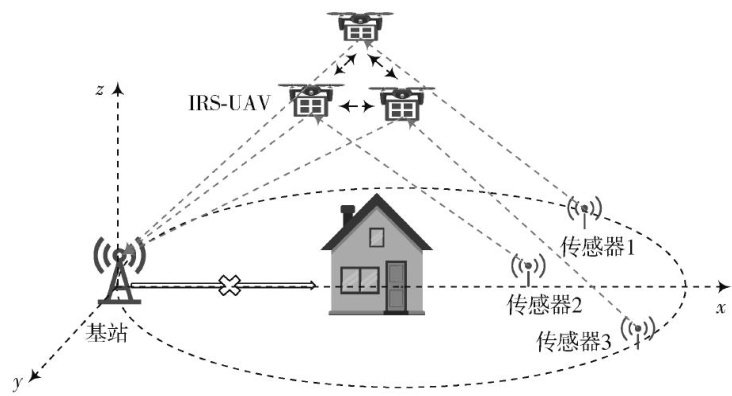
通信与信息工程 | IRS-UAV辅助WSN上行通信的状态优化
通信与信息工程 | IRS-UAV辅助WSN上行通信的状态优化
-

通信与信息工程 | 基于联盟博弈与模拟退火的无人机集群任务分配研究
通信与信息工程 | 基于联盟博弈与模拟退火的无人机集群任务分配研究
-
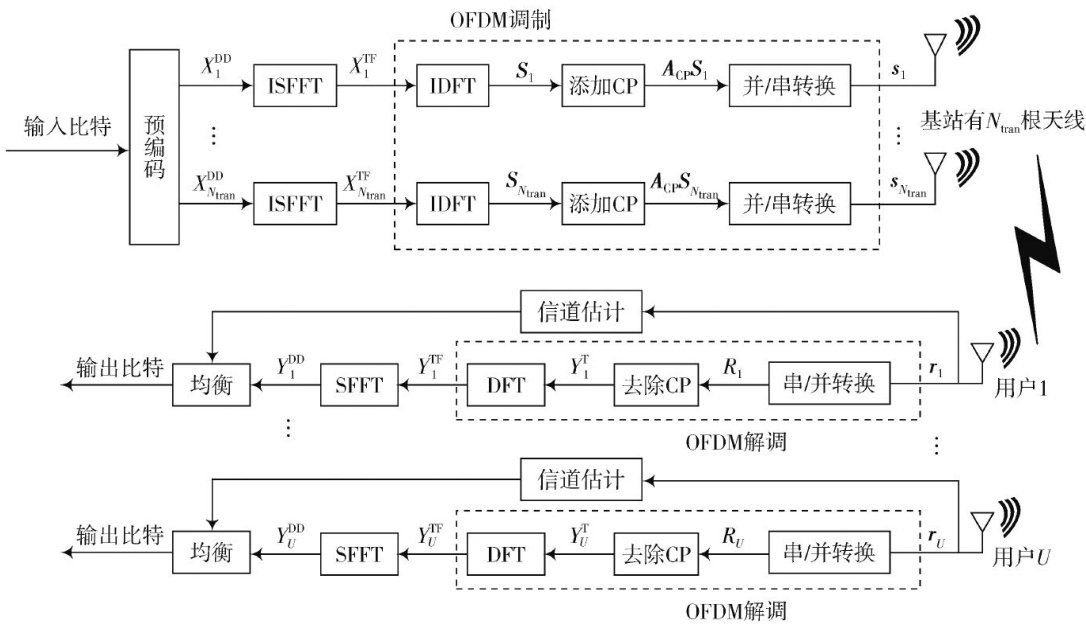
通信与信息工程 | 基于压缩感知贪婪算法SA-SWOMP的MIMO-OTFS信道估计
通信与信息工程 | 基于压缩感知贪婪算法SA-SWOMP的MIMO-OTFS信道估计
-
通信与信息工程 | 无人机双频宽带圆极化缝隙天线
通信与信息工程 | 无人机双频宽带圆极化缝隙天线
-

通信与信息工程 | 云服务器通信串口多标签数据安全采样研究
通信与信息工程 | 云服务器通信串口多标签数据安全采样研究
-
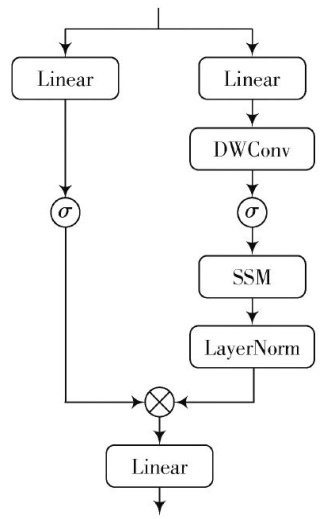
信号分析与图像处理 | 基于Mamba的轻量级多模态脑肿瘤MRI图像分割
信号分析与图像处理 | 基于Mamba的轻量级多模态脑肿瘤MRI图像分割
-

信号分析与图像处理 | 基于卡尔曼滤波的高速运动模糊图像自适应复原方法
信号分析与图像处理 | 基于卡尔曼滤波的高速运动模糊图像自适应复原方法
-
信号分析与图像处理 | 基于改进YOL011的遥感图像军事伪装目标识别算法研究
信号分析与图像处理 | 基于改进YOL011的遥感图像军事伪装目标识别算法研究
-

信号分析与图像处理 | 基于跨层协同交互与空频联合感知的遥感图像去雾
信号分析与图像处理 | 基于跨层协同交互与空频联合感知的遥感图像去雾
-
信号分析与图像处理 | 基于改进YOLOv8n的航拍视角小目标检测算法
信号分析与图像处理 | 基于改进YOLOv8n的航拍视角小目标检测算法
-

信号分析与图像处理 | 基于改进YOLOv11n的X光安检图像违禁品检测算法
信号分析与图像处理 | 基于改进YOLOv11n的X光安检图像违禁品检测算法
-
信号分析与图像处理 | 基于MEGNet的岩心孔洞图像分割算法
信号分析与图像处理 | 基于MEGNet的岩心孔洞图像分割算法
-

信号分析与图像处理 | 复杂场景下监控视频异常场景监测
信号分析与图像处理 | 复杂场景下监控视频异常场景监测
-
网络与信息安全 | 面向密集人群场景的多径聚合姿态估计网络研究
网络与信息安全 | 面向密集人群场景的多径聚合姿态估计网络研究
-
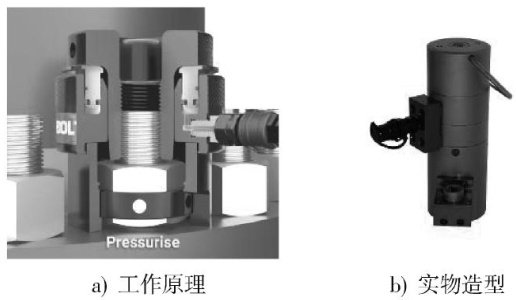
电子技术及应用 | 基于视觉识别的液压拉伸器四轴对准装置
电子技术及应用 | 基于视觉识别的液压拉伸器四轴对准装置
-
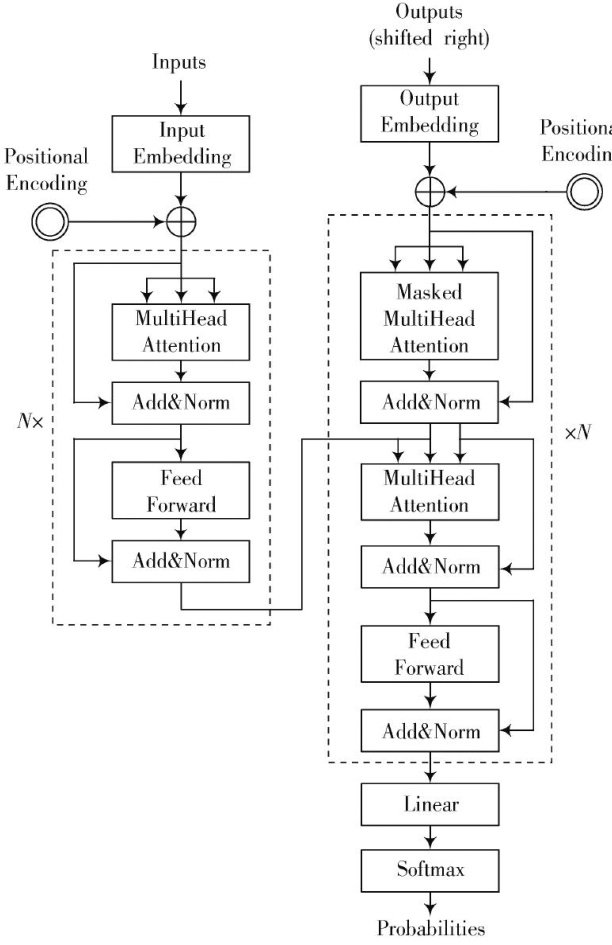
电子技术及应用 | 基于Transformer的电离层fbEs短期预测
电子技术及应用 | 基于Transformer的电离层fbEs短期预测
-
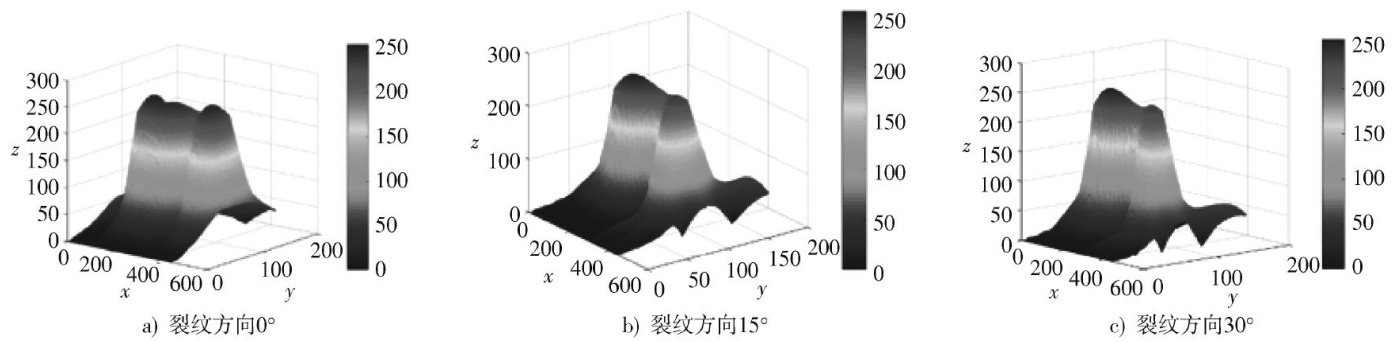
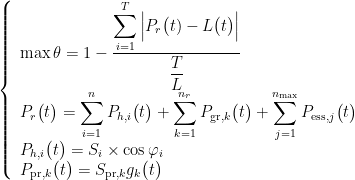
电子技术及应用 | 基于原型学习的裂纹方向细粒度分类方法
电子技术及应用 | 基于原型学习的裂纹方向细粒度分类方法
-
电子技术及应用 | 基于鲸鱼优化算法的低压机组双层容量参数辨识
电子技术及应用 | 基于鲸鱼优化算法的低压机组双层容量参数辨识
-
电子技术及应用 | 基于FPGA+ARM的多通道数据采集系统设计
电子技术及应用 | 基于FPGA+ARM的多通道数据采集系统设计
-
电子技术及应用 | 无线供电的旋转机械部件监测系统设计
电子技术及应用 | 无线供电的旋转机械部件监测系统设计
-
测控与自动化技术 | 基于非线性模型预测算法下机械臂轨迹跟踪控制
测控与自动化技术 | 基于非线性模型预测算法下机械臂轨迹跟踪控制
-

测控与自动化技术 | 基于改进Snake算法的圆孔类零件测量方法
测控与自动化技术 | 基于改进Snake算法的圆孔类零件测量方法
-

测控与自动化技术 | 基于AUKF的机器人视觉伺服模型预测控制方法研究
测控与自动化技术 | 基于AUKF的机器人视觉伺服模型预测控制方法研究
-

测控与自动化技术 | 基于合作博弈的联邦学习聚合算法
测控与自动化技术 | 基于合作博弈的联邦学习聚合算法
-
智能交通与导航 | 改进双向A\*算法在室内机器人导航全局路径规划中的应用
智能交通与导航 | 改进双向A\*算法在室内机器人导航全局路径规划中的应用
-

智能交通与导航 | 基于轻量化网络的分心驾驶检测方法研究
智能交通与导航 | 基于轻量化网络的分心驾驶检测方法研究
-
智能交通与导航 | 基于BO-XGBoost的弯道交通微波识别与预警技术研究
智能交通与导航 | 基于BO-XGBoost的弯道交通微波识别与预警技术研究
-
智能交通与导航 | 基于改进LO算法求解无人机山地三维路径规划
智能交通与导航 | 基于改进LO算法求解无人机山地三维路径规划
 达到 94.2% mAP@0.5:0.95 达到 72.3% ,相较于原YOLOv11n算法分别提升 1.1% 和2.10% ,参数量减少 19.2% 。新模型在轻量化的同时实现了较高的检测精度,具有较好的有效性和实用性。
达到 94.2% mAP@0.5:0.95 达到 72.3% ,相较于原YOLOv11n算法分别提升 1.1% 和2.10% ,参数量减少 19.2% 。新模型在轻量化的同时实现了较高的检测精度,具有较好的有效性和实用性。




















 登录
登录