

目录
快速导航-
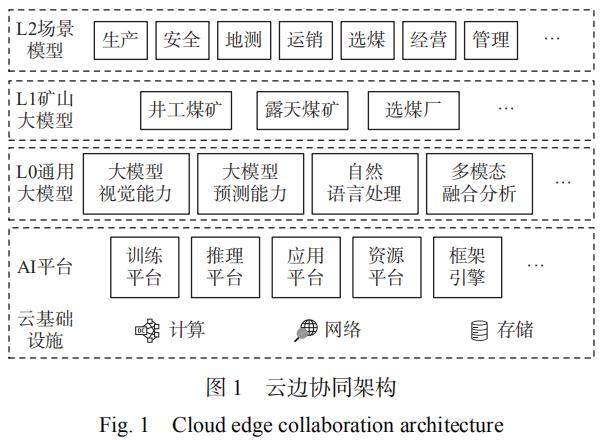
科研成果 | 矿山人工智能大模型标准研究制定
科研成果 | 矿山人工智能大模型标准研究制定
-

科研成果 | 基于多源时序数据的煤矿入井人员风险预警研究
科研成果 | 基于多源时序数据的煤矿入井人员风险预警研究
-
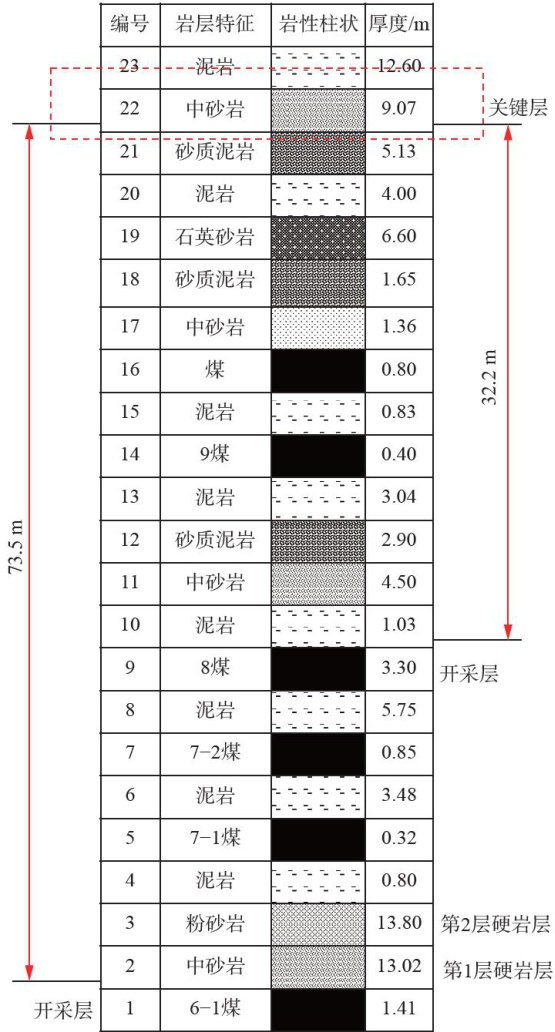
科研成果 | 双煤层重复采动下覆岩运移-裂隙演化的光频域反射响应机制研究
科研成果 | 双煤层重复采动下覆岩运移-裂隙演化的光频域反射响应机制研究
-
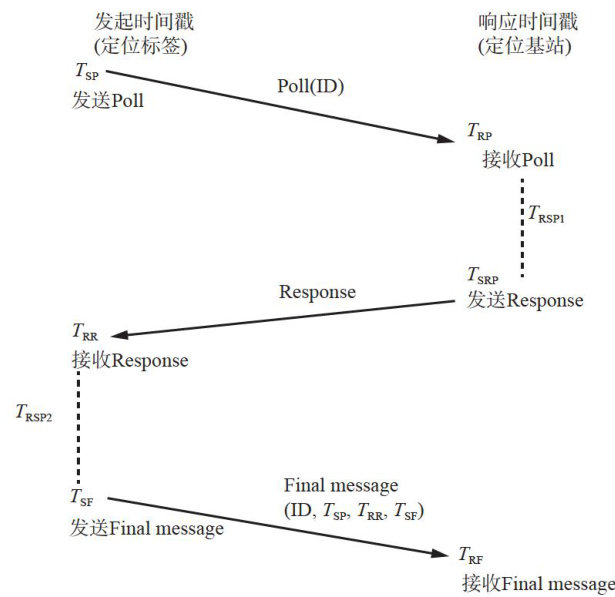
科研成果 | 煤矿井下UWB定位数据跳变抑制研究
科研成果 | 煤矿井下UWB定位数据跳变抑制研究
-

科研成果 | 基于多阶段去噪与双分支时序网络的井下RSSI定位方法
科研成果 | 基于多阶段去噪与双分支时序网络的井下RSSI定位方法
-
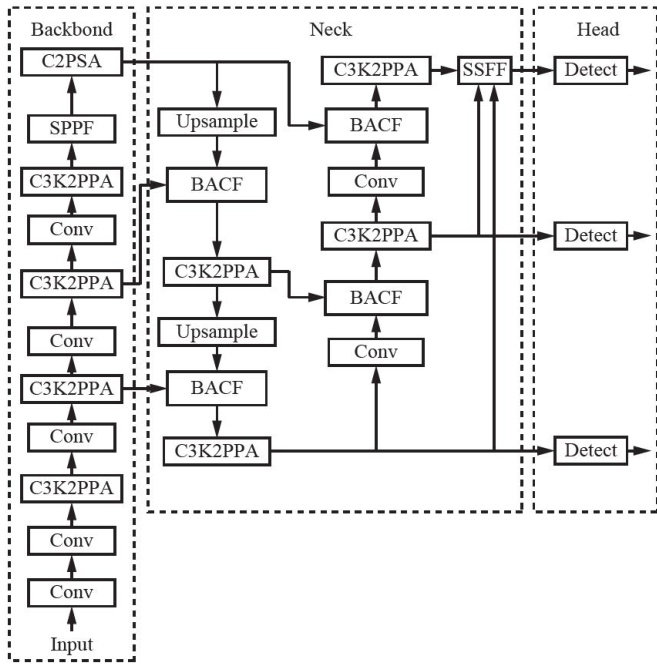
分析与研究 | 基于改进YOLOv11n模型的输送带异物检测方法
分析与研究 | 基于改进YOLOv11n模型的输送带异物检测方法
-

分析与研究 | 基于改进YOLOv11n的轻量化刮板链条检测算法
分析与研究 | 基于改进YOLOv11n的轻量化刮板链条检测算法
-

分析与研究 | 基于MPC-FAPID的复杂工业场景轮式巡检机器人轨迹跟踪控制
分析与研究 | 基于MPC-FAPID的复杂工业场景轮式巡检机器人轨迹跟踪控制
-
分析与研究 | 综采工作面整体三维空间直线度评估研究
分析与研究 | 综采工作面整体三维空间直线度评估研究
-

分析与研究 | 基于改进小波阈值的TDLAS系统一次谐波降噪算法研究
分析与研究 | 基于改进小波阈值的TDLAS系统一次谐波降噪算法研究
-
分析与研究 | 岩巷掘进工作面除尘系统联动风幕隔尘技术研究
分析与研究 | 岩巷掘进工作面除尘系统联动风幕隔尘技术研究
-
分析与研究 | 综掘工作面粉尘污染演化数值计算及综合除尘系统研究
分析与研究 | 综掘工作面粉尘污染演化数值计算及综合除尘系统研究
-
分析与研究 | 不同爆炸条件下瓦斯-煤尘爆炸冲击波传播规律研究
分析与研究 | 不同爆炸条件下瓦斯-煤尘爆炸冲击波传播规律研究
-

分析与研究 | 基于电-振信号联合的电动机故障诊断研究
分析与研究 | 基于电-振信号联合的电动机故障诊断研究
-
分析与研究 | 矿用高压电缆局部放电信号去噪方法
分析与研究 | 矿用高压电缆局部放电信号去噪方法
-
分析与研究 | 深部多层坚硬顶板动-静载耦合致灾机制与监测
分析与研究 | 深部多层坚硬顶板动-静载耦合致灾机制与监测
-

分析与研究 | 支护应力对巷道围岩临界应力影响的数值模拟研究
分析与研究 | 支护应力对巷道围岩临界应力影响的数值模拟研究
-
分析与研究 | 厚煤层沿空掘巷下小煤柱宽度及切顶卸压控制研究
分析与研究 | 厚煤层沿空掘巷下小煤柱宽度及切顶卸压控制研究
-

分析与研究 | 柔模墙沿空留巷及爆破防治巷道底鼓研究
分析与研究 | 柔模墙沿空留巷及爆破防治巷道底鼓研究
-
分析与研究 | 基于组合赋权的煤矿采空区岩体完整性模糊综合评价
分析与研究 | 基于组合赋权的煤矿采空区岩体完整性模糊综合评价
 分数等指标上显著优于循环神经网络、卷积神经网络等模型,在少量异常事件的条件下亦具备较高检出率与低误报率,为煤矿入井人员风险识别与分级预警提供了可行的技术路径。
分数等指标上显著优于循环神经网络、卷积神经网络等模型,在少量异常事件的条件下亦具备较高检出率与低误报率,为煤矿入井人员风险识别与分级预警提供了可行的技术路径。 分数、精确率和召回率高且收敛快,在不同场景测试下的准确率和 F1 分数均超过 85% ,具有良好的泛化能力;在动态环境下的连续定位任务中,该方法平均定位误差仅为 0.12m 。
分数、精确率和召回率高且收敛快,在不同场景测试下的准确率和 F1 分数均超过 85% ,具有良好的泛化能力;在动态环境下的连续定位任务中,该方法平均定位误差仅为 0.12m 。 分别较YOLOv1ln模型提高了 0.2% 和 0.5% ,且运算速度提高8帧/s,表现出良好的通用性和泛化能力。
分别较YOLOv1ln模型提高了 0.2% 和 0.5% ,且运算速度提高8帧/s,表现出良好的通用性和泛化能力。 基本一致,验证了理论与数值计算相结合方法的准确性,而当支护应力提升至 0.8MPa 时,临界应力达到 44.69MPa ,安全系数为1.05,判断巷道基本安全。研究结果为确定巷道支护应力提供了新的方法。
基本一致,验证了理论与数值计算相结合方法的准确性,而当支护应力提升至 0.8MPa 时,临界应力达到 44.69MPa ,安全系数为1.05,判断巷道基本安全。研究结果为确定巷道支护应力提供了新的方法。










 登录
登录