
目录
快速导航-
综述 | 机器人变刚度执行器设计及其应用研究进展
综述 | 机器人变刚度执行器设计及其应用研究进展
-
综述 | 油气管道机器人速度可控技术研究现状及发展
综述 | 油气管道机器人速度可控技术研究现状及发展
-
机器人驱动与构型创新 | 基于刚性约束的新型三平移绳驱并联机器人构型设计与性能分析
机器人驱动与构型创新 | 基于刚性约束的新型三平移绳驱并联机器人构型设计与性能分析
-
机器人驱动与构型创新 | 基于复合轮系的变刚度关节设计及试验验证
机器人驱动与构型创新 | 基于复合轮系的变刚度关节设计及试验验证
-
机器人驱动与构型创新 | 基于弯扭一体致动器的仿龟软体机器人设计与研究
机器人驱动与构型创新 | 基于弯扭一体致动器的仿龟软体机器人设计与研究
-
机器人驱动与构型创新 | 松散介质下机器人螺旋钻进机制分析与机构设计研究
机器人驱动与构型创新 | 松散介质下机器人螺旋钻进机制分析与机构设计研究
-
机器人驱动与构型创新 | 仿乌贼水下机器人系统设计与试验
机器人驱动与构型创新 | 仿乌贼水下机器人系统设计与试验
-

机器人驱动与构型创新 | 寄生机构式轮腿机器人空间刚度研究
机器人驱动与构型创新 | 寄生机构式轮腿机器人空间刚度研究
-
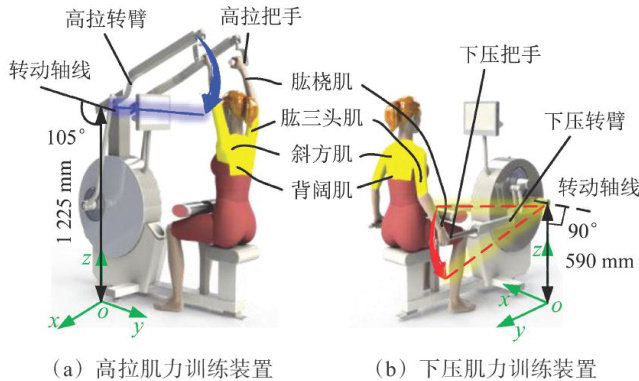
机器人驱动与构型创新 | 上肢肌力训练装置测试机构的设计与分析
机器人驱动与构型创新 | 上肢肌力训练装置测试机构的设计与分析
-
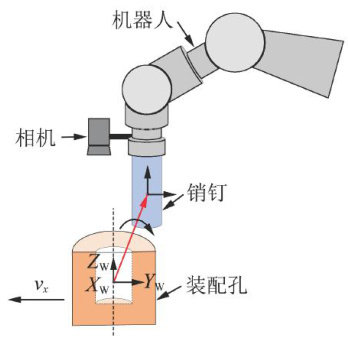
智能控制与优化方法 | 基于强化学习的移动目标柔顺装配方法
智能控制与优化方法 | 基于强化学习的移动目标柔顺装配方法
-
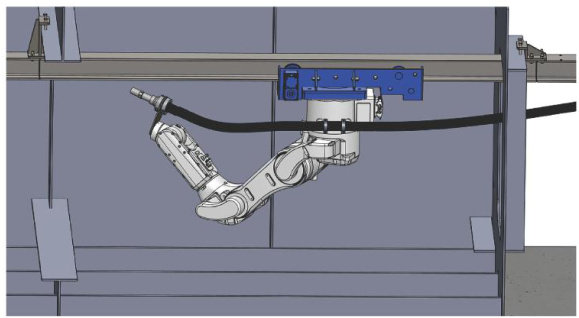
智能控制与优化方法 | 基于改进PSO算法的钢箱梁内喷砂机器人轨迹规划研究
智能控制与优化方法 | 基于改进PSO算法的钢箱梁内喷砂机器人轨迹规划研究
-
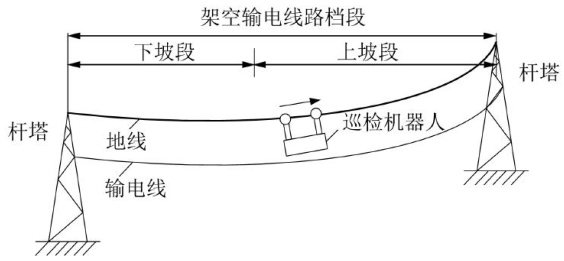
智能控制与优化方法 | 基于转矩分配的巡检机器人爬坡能力优化方法研究
智能控制与优化方法 | 基于转矩分配的巡检机器人爬坡能力优化方法研究
-
智能控制与优化方法 | 基于椭球外形物品包装的自移式缠绕包装机器人运动学建模与仿真
智能控制与优化方法 | 基于椭球外形物品包装的自移式缠绕包装机器人运动学建模与仿真
-
智能控制与优化方法 | 下肢穿戴装置人机耦合模型与助力特性研究
智能控制与优化方法 | 下肢穿戴装置人机耦合模型与助力特性研究
-

工程应用与案例研究 | 面向折弯管型母线的自主绕包移动机器人运动控制
工程应用与案例研究 | 面向折弯管型母线的自主绕包移动机器人运动控制
-
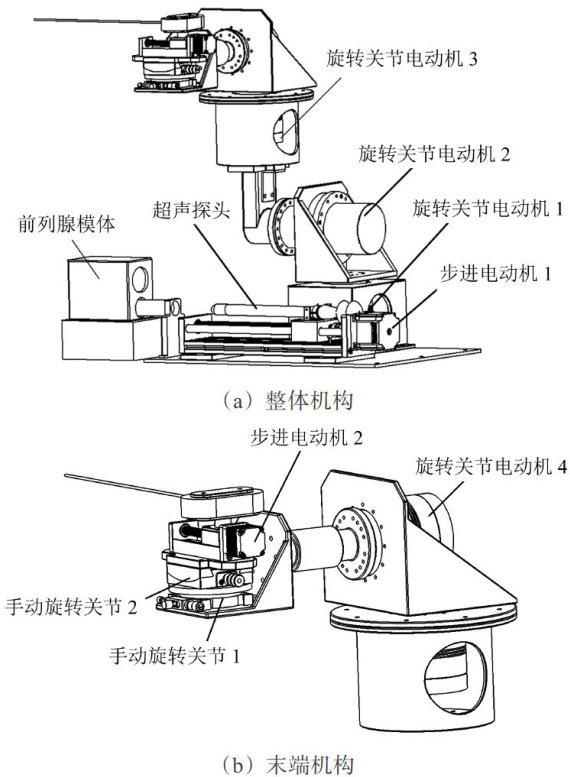
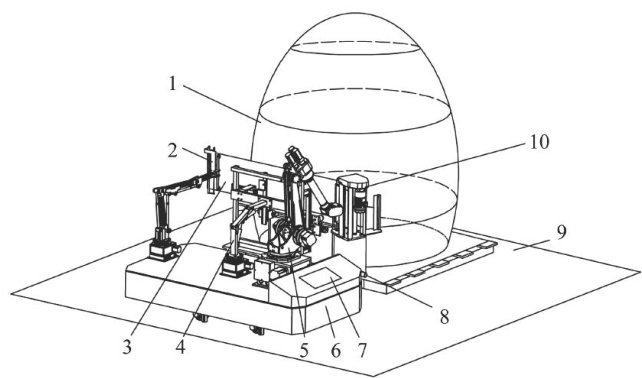
工程应用与案例研究 | 前列腺辅助穿刺机械手臂机构设计及运动学分析
工程应用与案例研究 | 前列腺辅助穿刺机械手臂机构设计及运动学分析
-
工程应用与案例研究 | 外骨骼式上肢康复机器人机构设计与运动学研究
工程应用与案例研究 | 外骨骼式上肢康复机器人机构设计与运动学研究
-
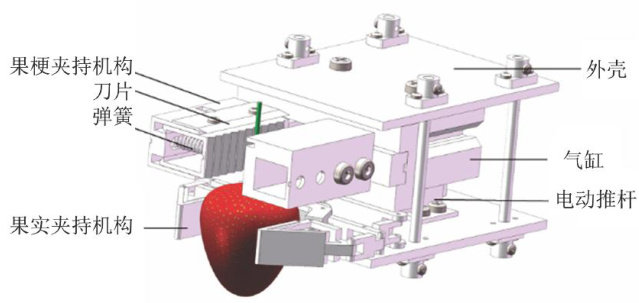
工程应用与案例研究 | 草莓无损采摘机器人末端执行器结构设计与试验
工程应用与案例研究 | 草莓无损采摘机器人末端执行器结构设计与试验
-
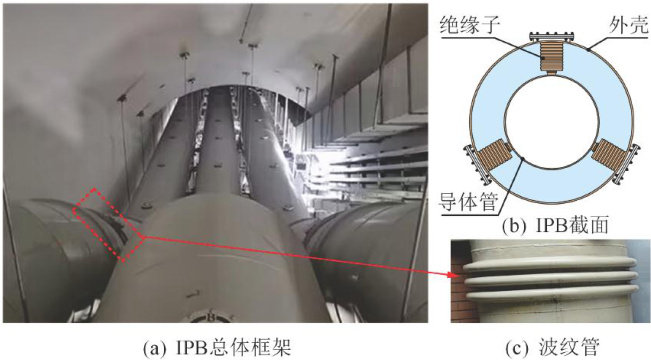
工程应用与案例研究 | 离相封闭母线爬壁巡检机器人设计与壁面运动分析
工程应用与案例研究 | 离相封闭母线爬壁巡检机器人设计与壁面运动分析
-

工程应用与案例研究 | 基于改进Lazy-PRM算法的双臂巡检机器人避障路径规划
工程应用与案例研究 | 基于改进Lazy-PRM算法的双臂巡检机器人避障路径规划













 登录
登录