
目录
快速导航-
自动驾驶技术专题 | 自动驾驶安全的多维透视:关键挑战与协同治理框架
自动驾驶技术专题 | 自动驾驶安全的多维透视:关键挑战与协同治理框架
-
自动驾驶技术专题 | ADAS体系下AEB的安全认证挑战:感知局限、验证范式与人机协同
自动驾驶技术专题 | ADAS体系下AEB的安全认证挑战:感知局限、验证范式与人机协同
-
自动驾驶技术专题 | 驾驶员特征、车辆状态和行车环境对驾驶行为影响研究
自动驾驶技术专题 | 驾驶员特征、车辆状态和行车环境对驾驶行为影响研究
-

自动驾驶技术专题 | 基于强化学习算法的自适应巡航控制系统测试场景生成方法
自动驾驶技术专题 | 基于强化学习算法的自适应巡航控制系统测试场景生成方法
-

自动驾驶技术专题 | 激光雷达与摄像头时空同步技术的设计与实现
自动驾驶技术专题 | 激光雷达与摄像头时空同步技术的设计与实现
-
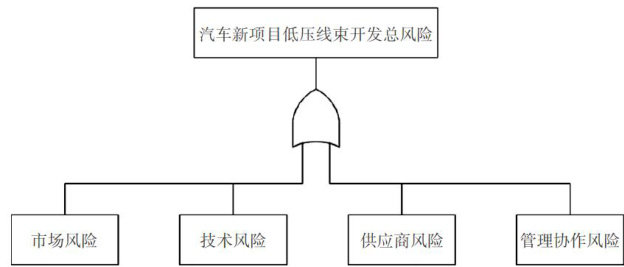
自动驾驶技术专题 | 基于故障树与贝叶斯网络的汽车线束开发风险管理
自动驾驶技术专题 | 基于故障树与贝叶斯网络的汽车线束开发风险管理
-
自动驾驶技术专题 | 车用陶瓷气体传感器性能影响因素探究
自动驾驶技术专题 | 车用陶瓷气体传感器性能影响因素探究
-
自动驾驶技术专题 | 基于实际工况谱的功率模块寿命预测方法研究
自动驾驶技术专题 | 基于实际工况谱的功率模块寿命预测方法研究














 登录
登录